HD map with JOSM & Lanelet2 - part 2
Summary
After successfully loaded a map file from pcl rosbag in JOSM, we’ll see how to draw a lane network, load it in Rviz with Lanelet2 and do global planning with mission planner.
End results:
Prerequisite
- ROS1 tested with melodic & noetic
- JOSM
- lanelet2_map_loader
- lanelet2_global_planner
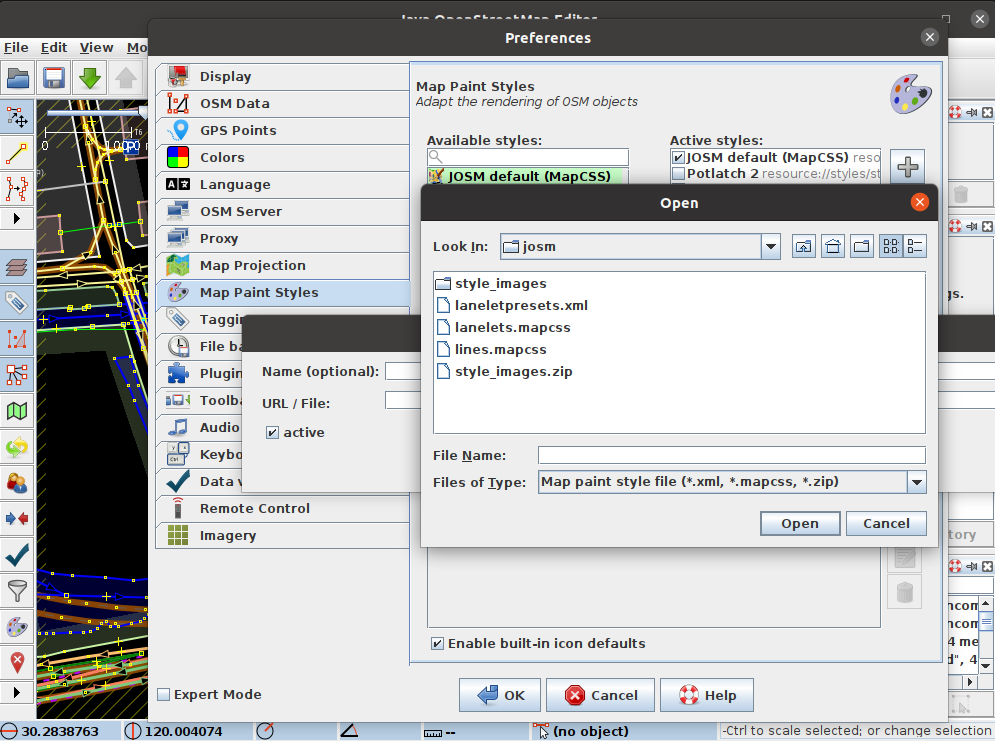
1 - Install Lanelet2 plugin in JOSM
In lanelet2_map_loader->Lanelet2->lanelet2_maps->josm, there are 3 files: laneletpresets.xml lanelets.mapcsss lines.mapcss
Open JOSM
- Edit->Preferences->Map Settings -> Map Paint styles -> add (+) select
lanelets.mapcssandlines.mapcss - Edit->Preferences->Map Settings -> Tagging Presets -> add (+) select
laneletpresets.xml
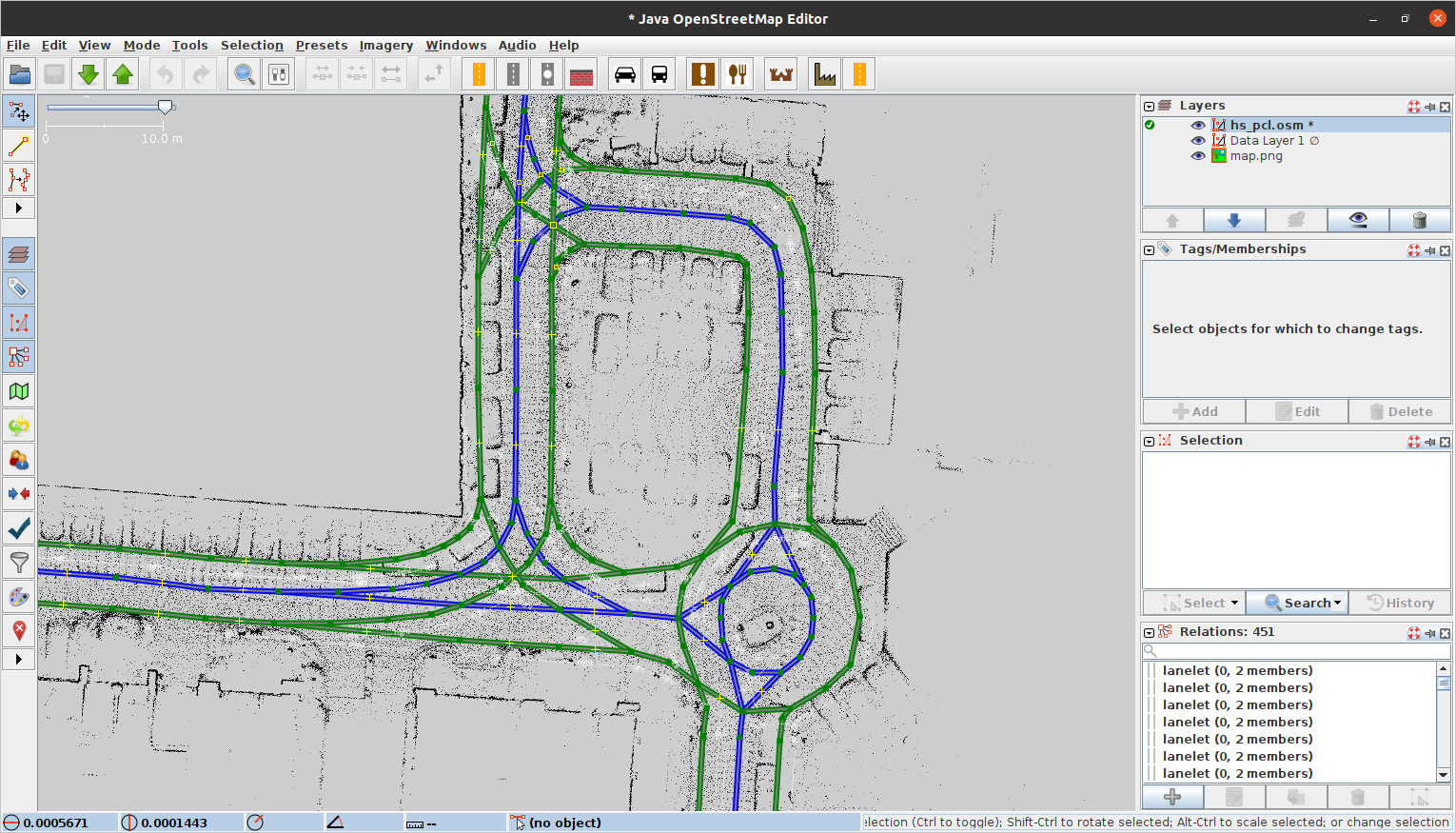
2 - Draw lanes in JOSM
Open JOSM and load your previous png file generated from rosbag, here for demo purpose:
- File->New Layer
- Imagery-> New picture layer from file… ->lanelet2_map_loader->map_loader->data->map.png
Follow these two videos to draw lanes on your map image:
Example result:
Open JOSM
- File->New Layer
- Imagery-> New picture layer from file… ->lanelet2_map_loader->map_loader->data->map.png
- File->Open->lanelet2_map_loader->map_loader->data->hs_pcl.png
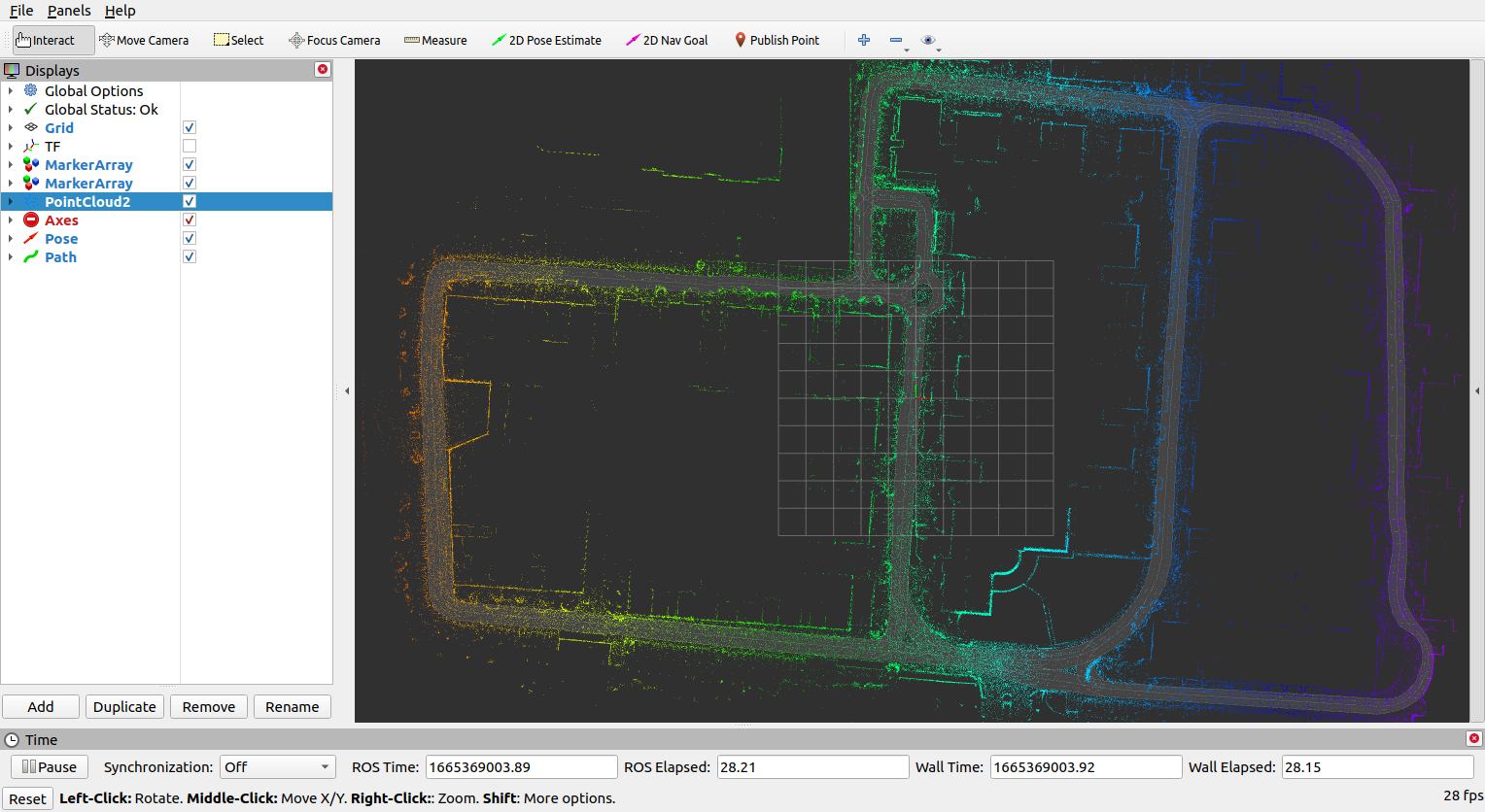
3 - Visualization in Rviz
After generating your own .osm file, in map_loader/launch/lanelet2_map_loader.launch, modify
L1 <arg name="file_name" default="$(find map_loader)/data/hs_pcl.osm"/>
L5 <arg name="pointcloud_map_path" default = "$(find map_loader)/data/ds.pcd"/>
L6 <arg name="pcl_grid_map" default = "$(find map_loader)/data/map.yaml"/>roslaunch map_loader lanelet2_map_loader.launchCheck pointcloud2 to see your pcd file.
4 - Global planning demo
roslaunch mission_planner mission_planning.launch- use
2D Nav Goalto send goal - use
2D Pose Estimateto modify start position
You can play with path_resolution in mission_planning.launch to smooth out the global path.