HD map with JOSM & Lanelet2 - part 1
Summary
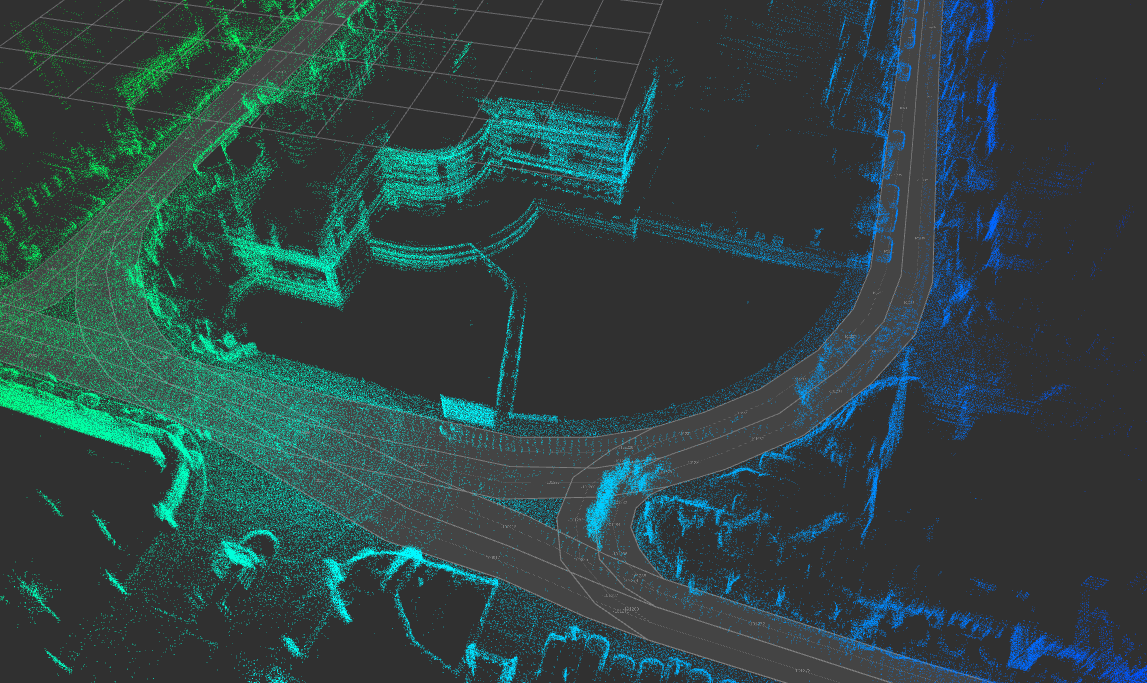
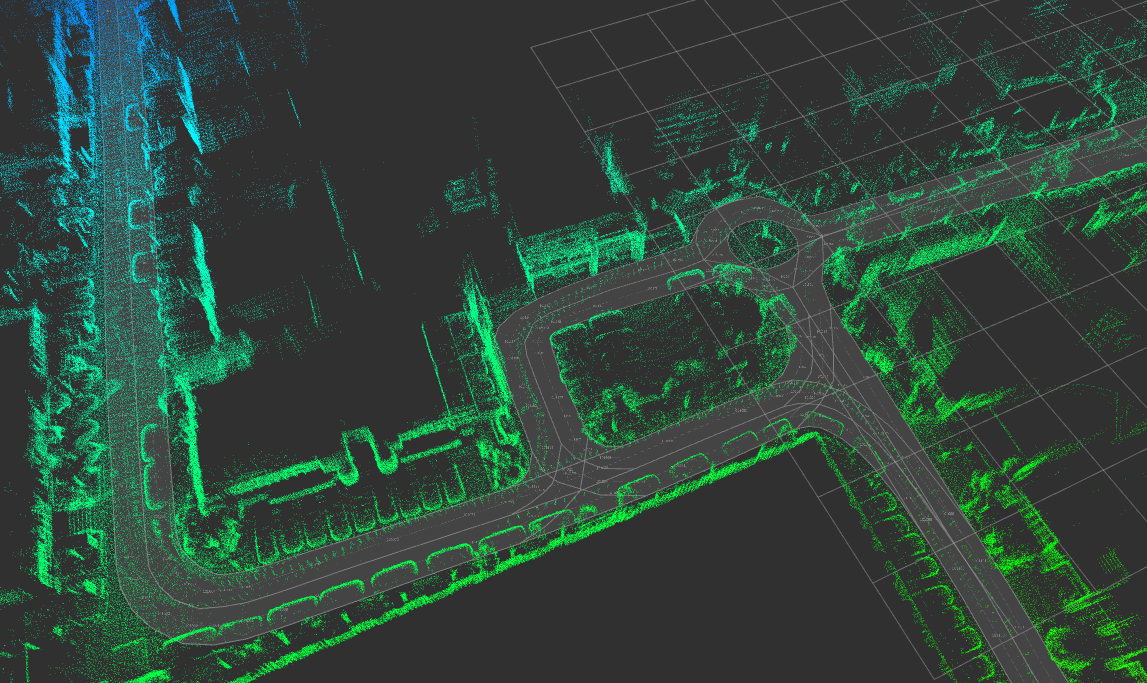
After getting a pointcloud map with for example LeGo-LOAM in rosbag file, load it to JOSM with real scale for easier lane map drawing.
End results:
Prerequisite
- ROS1 tested with melodic & noetic
- pcl-ros
- JOSM
- Lanelet2
- 3D_Slam_tools
1 - Convert bag to pcd
rosrun pcl_ros bag_to_pcd <file_in.bag> <topic> <output_directory> [<target_frame>]2 - Convert pcd to bt
roslaunch 3D_Slam_tools straightener.launch input_path:="PATH/TO/PCD.pcd" output_path:="PATH/TO/OUTPUT.bt"Use arrow key to adjust the map distortion if needed, ctrl-c to close and save to .bt file.
3 - Convert bt to pgm map file
roslaunch 3D_Slam_tools octomap_mapping.launch path:="PATH/TO/OUTPUT.bt" z_min:=-10 z_max:=0.5- Setting a large
z_minallow the map to keep all the ground points which are very useful for creating lanes. - Adjust
z_maxto remove useless point clouds, like tree and building.
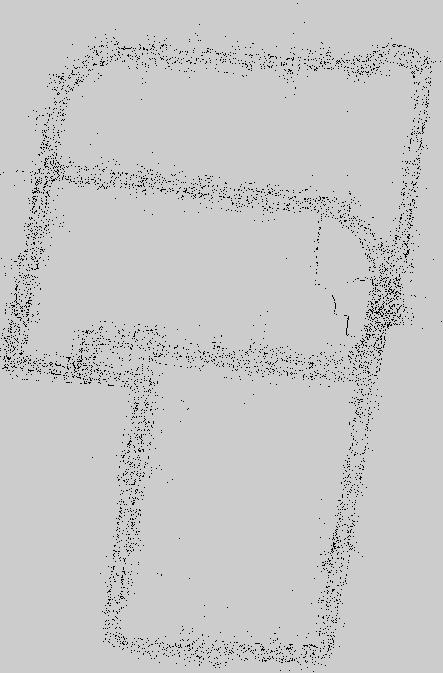
Run map_saver to save the map:
rosrun map_server map_saverExample output:
map.yaml
image: map.pgm
resolution: 0.050000
origin: [-220.099997, -104.099997, -nan]
negate: 0
occupied_thresh: 0.65
free_thresh: 0.196map.pgm
4 - Visualization in JOSM
Add PicLayer plugin in JOSM:
mkdir -p ~/.josm/plugins
open josm
Edit -> Preferences -> Plugins click Download list, wait for the plugins list, check the PicLayer plugin checkbox, click update plugins
checkout files in ~/.josm/plugins, restart if needed
Convert pgm to png
convert map.pgm -fuzz 20% -transparent white output.pngIt becomes a rgba image with transparent background, very useful to overlay on satellite image.
Add png in JOSM
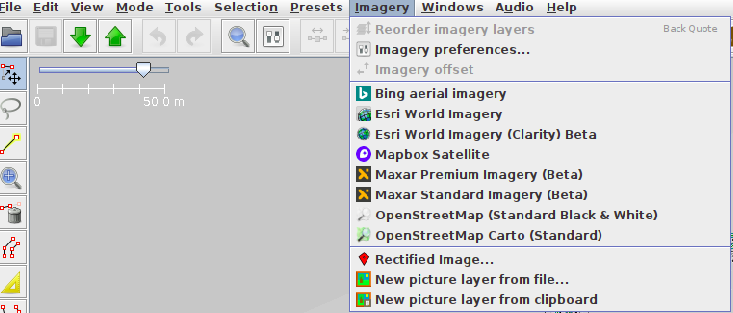
Imagery->New picture layer from file... -> choose the previous output.png
Imagery->Mapbox Satellite, this is usually a good satellite image
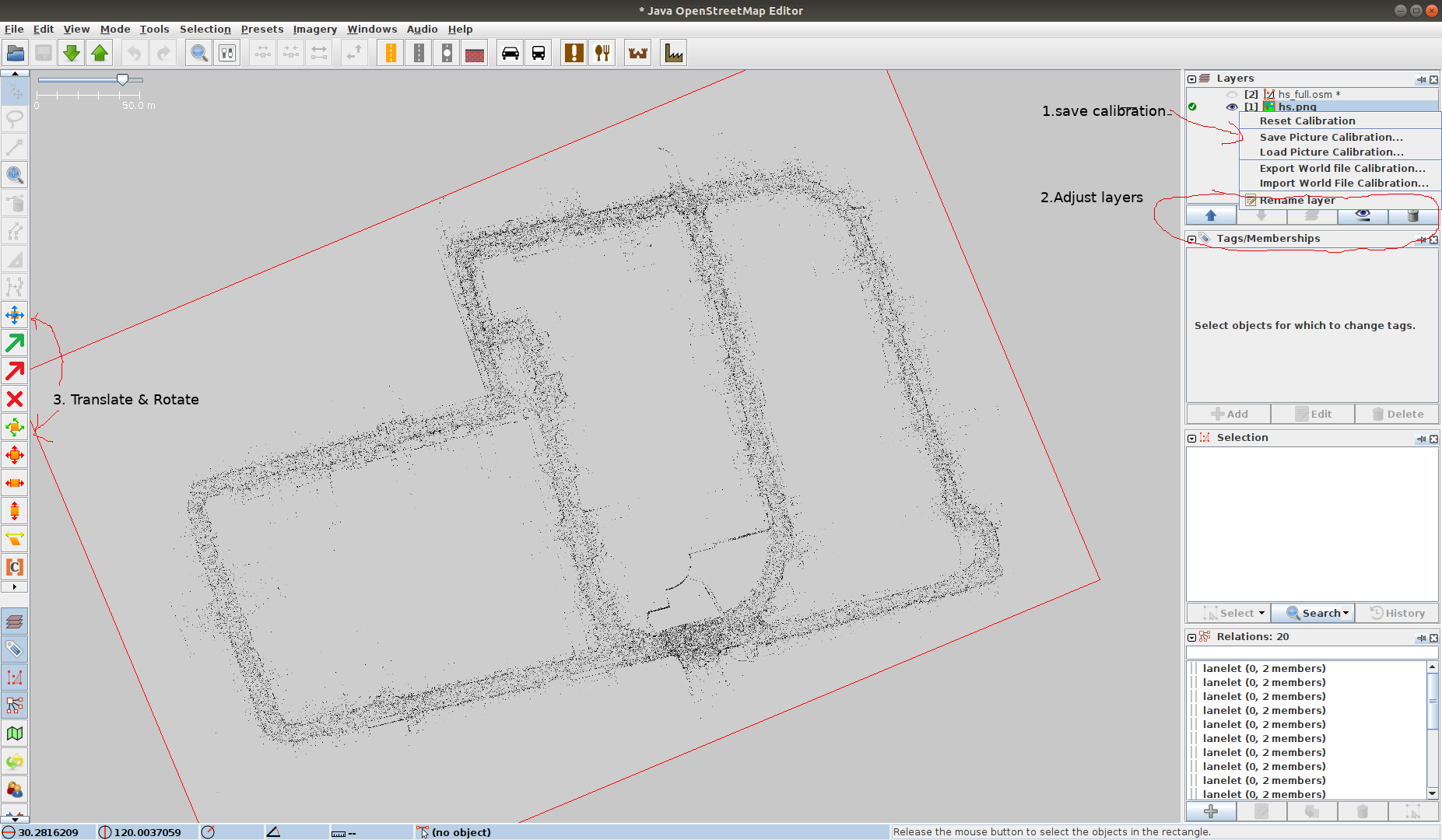
Save calibration, open .cal file, change INITIAL_SCALE value to 100* the resolution in map.yaml ( in map.pgm resolution=0.05 so 0.05*100 = 5.0)
#JOSM PicLayer plugin calibration data
#Wed Apr 28 13:10:02 CST 2021
POSITION_X=1.3358406457062645E7
POSITION_Y=3539617.8704096507
INITIAL_SCALE=5.0
M00=0.3857612552908848
M11=0.3857612552908848
M10=-0.922598641835333
M02=29.753357212335082
M01=0.922598641835333
M12=79.0004318155288Reload the png, the png will be at the right scale, follow step 2 and 3 in the previous picture to align (in step 2, you can put the order and opacity of layers that’s why a rgba image comes handy)
Result:

0 - Next
How to draw lane with josm, load it in RVIZ with Lanelets and planning with mission planner.